|
I am an Ph.D. student at University of Michigan, Ann Arbor, supervised by Prof. Qing Qu. Previously, I obtained my Bachelor's degree in Mechanical Engineering from Huazhong university of Science and Technology, advised by Prof. Zhigang Wu; Master's degree in Mechanical Engineering and Electrical and Computer Engineering from University of Michigan, Ann Arbor, advised by Prof. Chad Jenkins My research interests lie in generative model and diffusion model. Recently, my project is related the empirical and theoretical analysis of reproducibility in diffusion model, and its applications related to training efficiency, controllable generation and privacy. My previous works are related to 3D vision, robotics manipulation and reinforcement learning. [Updated in 02/2024] |

|
|
[02/2024] Our work on Multi-stage Diffusion Model was accepted by CVPR2024! [10/2023] Our work on Diffusion Model Reproducibility was accepted by NeurIPS2023 Workshop, received best paper award ! [08/2022] Our work on TransNet was accepted by ECCV2022 Workshop! [07/2022] Our work on Clearpose was accepted by ECCV2022! [06/2022] Our work on Progresslabeller was accepted by IROS2022! |
|
|
|
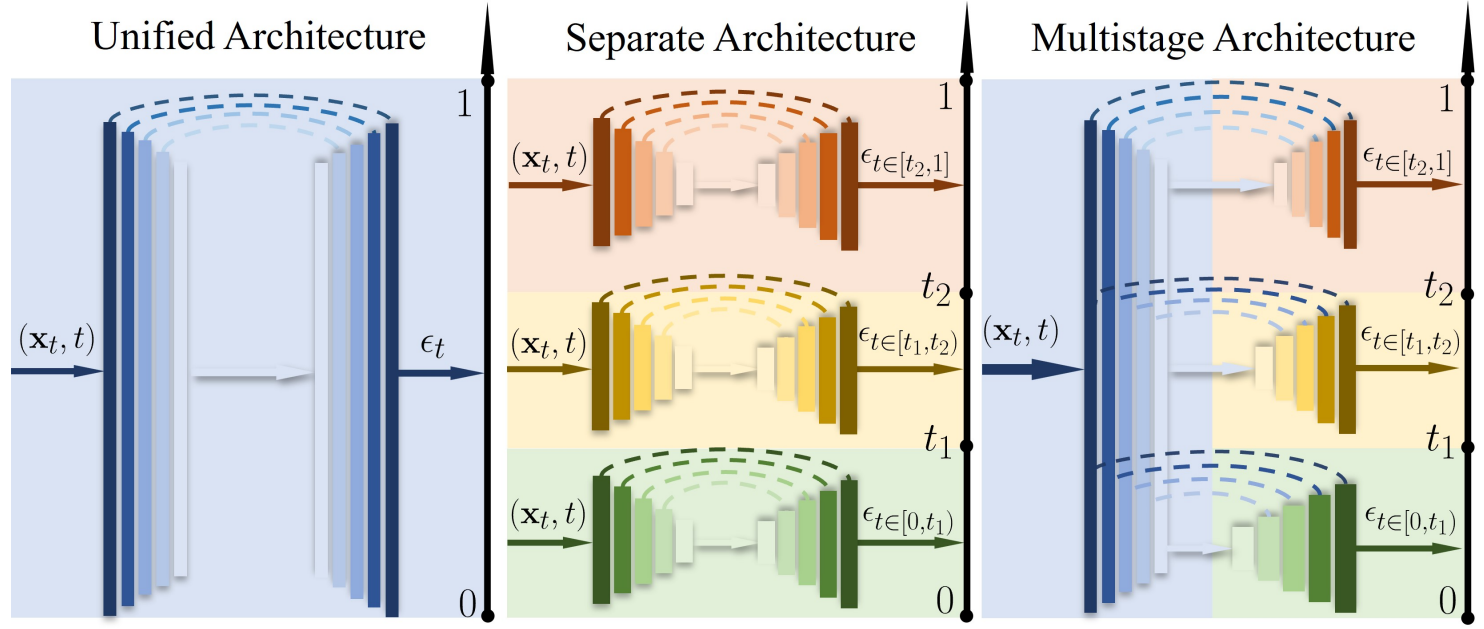
Huijie Zhang, Yifu Lu, Ismail Alkhouri, Saiprasad Ravishankar, Dogyoon Song, Qing Qu CVPR, 2024 arXiv In this study, we significantly enhance the training and sampling efficiency of diffusion models through a novel multi-stage framework. This method divides the time interval into several stages, using a specialized multi-decoder U-net architecture that combines time-specific models with a common encoder for all stages. |
|
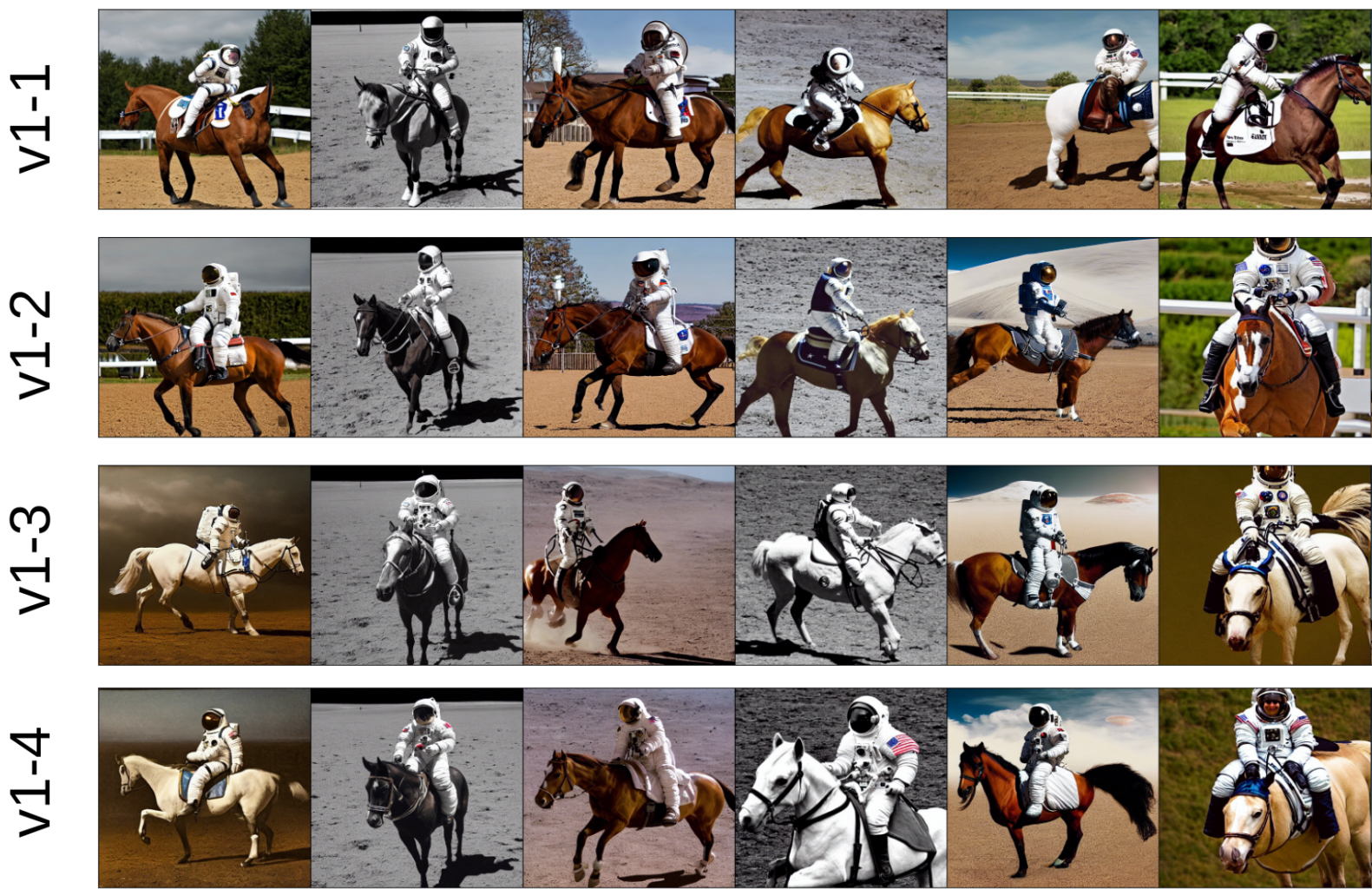
Huijie Zhang, Jinfan Zhou, Yifu Lu, Minzhe Guo, Peng Wang, Liyue Shen, Qing Qu NeurIPS Workshop, 2023 (best paper award) arXiv We investigate an intriguing and prevalent phenomenon of diffusion models: given the same starting noise input and a deterministic sampler, different diffusion models often yield remarkably similar outputs. |
|
|
Huijie Zhang, Anthony Opipari, Xiaotong Chen, Jiyue Zhu, Zeren Yu, Odest Chadwicke Jenkins, ECCV Workshop, 2022 arXiv /website We proposed TransNet, a two-stage pipeline that learns to estimate category-level transparent object pose using localized depth completion and surface normal estimation. |
|
|
Xiaotong Chen, Huijie Zhang, Zeren Yu, Anthony Opipari, Odest Chadwicke Jenkins, ECCV, 2022 arXiv /github /website We collected a large-scale transparent object dataset with RGB-D and annotated poses. And we benchmarked transparent object depth completion and poes estimation on this dataset. |
|
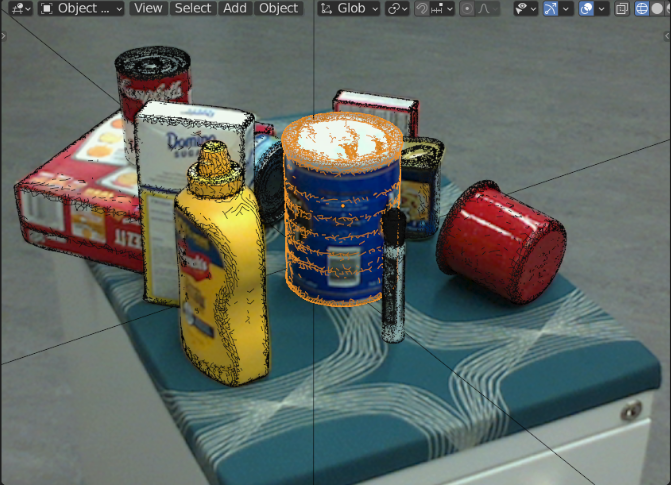
Xiaotong Chen, Huijie Zhang, Zeren Yu, Stanley Lewis, Odest Chadwicke Jenkins, IROS, 2022 arXiv /github /website ProgressLabeller is an efficient 6D pose annotation method. It is also the first open source tools compatible with transparent object. It was implemented as a blender Add-on, more user-friendly for using. |
|
|
|
Huijie Zhang, Phil Kangle Mu, Ying Jiang, Sihang Wei, github This Project useed Deep Q-learning from demonstration to teach agent cutting trees in Minecraft Environment |
|
|